
Rotational motion & Torque
Translational and Rotational motion
 Lever arm or moment arm
Top view or a door.
Lever arm or moment arm
Top view or a door.
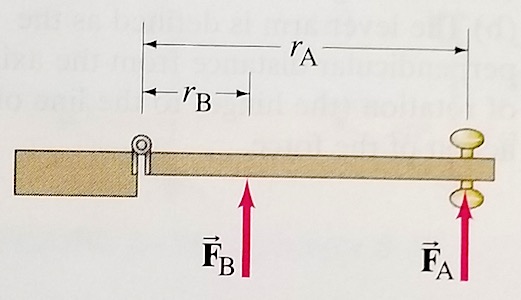 In above Figure, if you apply a force `F_A` to the door as shown, you will find that the greater the magnitude , `F_A`, the more quickly the door opens. But now if you apply the same magnitude force at a point closer to the hinge,`F_B`, the door will not open so quickly.
We find the angular acceleration of the door is proportional not on only to the magnitude of the force, but is also directly proportional to
In above Figure, if you apply a force `F_A` to the door as shown, you will find that the greater the magnitude , `F_A`, the more quickly the door opens. But now if you apply the same magnitude force at a point closer to the hinge,`F_B`, the door will not open so quickly.
We find the angular acceleration of the door is proportional not on only to the magnitude of the force, but is also directly proportional to 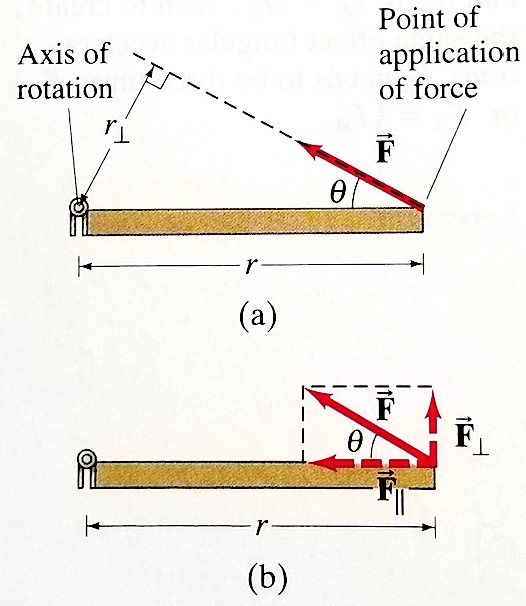 If the force applied is not perpendicular with the arm, can find the perpendicular lever arm
`r_⊥ = r sinθ` as shown in figure (a)
`τ = r sinθ F`
of we can find the perpendicular component of the applied force
`F_⊥ = Fsinθ` as shown in figure (b)
`τ = r Fsinθ `
If the force applied is not perpendicular with the arm, can find the perpendicular lever arm
`r_⊥ = r sinθ` as shown in figure (a)
`τ = r sinθ F`
of we can find the perpendicular component of the applied force
`F_⊥ = Fsinθ` as shown in figure (b)
`τ = r Fsinθ `
Lever arm or moment arm
Top view or a door.
In above Figure, if you apply a force `F_A` to the door as shown, you will find that the greater the magnitude , `F_A`, the more quickly the door opens. But now if you apply the same magnitude force at a point closer to the hinge,`F_B`, the door will not open so quickly.
We find the angular acceleration of the door is proportional not on only to the magnitude of the force, but is also directly proportional to the `color(red)(perpendicu l ar)` distance form the axis of rotation to the line along which the force acts. This distance is called lever arm or moment arm
if `r_A = 3r_B` than `α_A = 3α_B`
In other word, `F_B` must be three times as large as `F_A` to give the same angular acceleration.
Torque
The angular acceleration is proportional to the product of the force times the lever arm. This product is called the moment of the force about the axis, or ,more commonly it is called the torque (`τ`)
`τ = r_⊥ vec(F)`
(SI unit of torque `m•N`)
`r` and `vec(F)` must perpendicular each other
If the force applied is not perpendicular with the arm, can find the perpendicular lever arm
`r_⊥ = r sinθ` as shown in figure (a)
`τ = r sinθ F`
of we can find the perpendicular component of the applied force
`F_⊥ = Fsinθ` as shown in figure (b)
`τ = r Fsinθ `
`τ = rF sinθ `